The new 3D LiDAR Simulation tool, developed by Outsight, is the first LiDAR simulator on the market that doesn’t require any code and works with any type of LiDAR.
It was made possible by the helpful feedback from more than 300 early clients from a wide range of industries, applications, and places on its beta version.
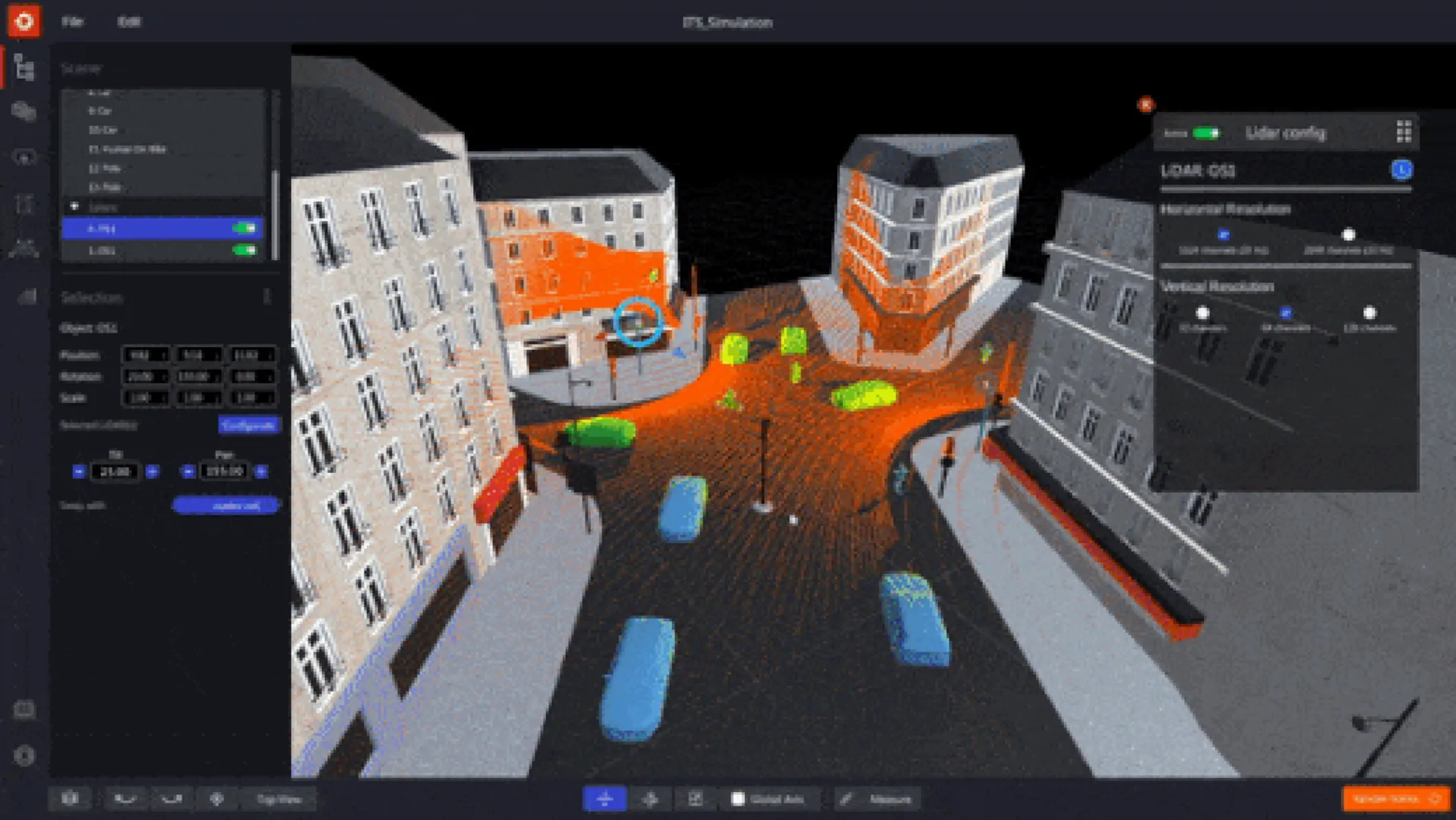
In the next video, one can see a simulation of a traffic flow, including people, vehicles, and buses that are being scanned by one LiDAR. The LiDAR can be moved and pointed in multiple directions to estimate coverage in different situations.
Why use a 3D LiDAR Simulator
Outsight’s long experience developing LiDAR Software Solutions in multiple contexts made us familiar with clients’ doubts on which sensor to use and how, and gave us insights on how to solve them with an easy and scalable solution.
Deciding which and how many LiDARs to use, as well as evaluating the sensors’ best locations (height, position, orientation), are among the most frequent questions that need to be answered in order to build the most performant and affordable solutions.
Also, as a potential user of LiDAR technology, you might wonder if the coverage results would change if there were more elements or if their types changed.
By being able to predict the performance depending on each setup and use case, the 3D LiDAR Simulator has already helped many users to do the right choices and configurations for their LiDAR project
What is Outsight Cloud
There is no need to install any software on your computer.
To use the simulator, one can simply connect to Outsight Cloud.
If you want to have access to Outsight Cloud, you can request it here.
Once the access is ready, one can run simulations to explore the best LiDAR setup and evaluate the coverage performance.
Besides, it is also possible to share files with other users, upload data recordings (.pcap files), and download LiDAR maps (.ply files).
How the Simulator works
Once you decide to start a new simulation, you will need to:
1. Create a scenario that matches your use-case
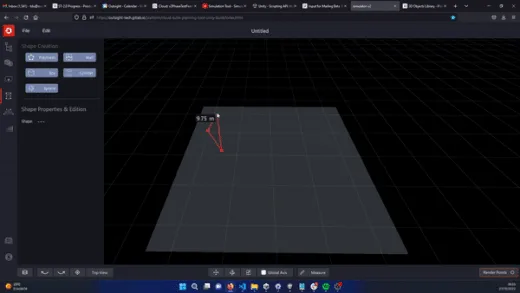
It is possible to create a user’s own 3D scene as a background by using the built-in tools for modifying 3D shapes.
The next video shows how to create a 3D building that respects a 2D reference map area.
2. Insert 3D objects
There is a wide variety of 3D objects available in the simulator, including people, trees, and different types of vehicles and two-wheelers.
For example, in response to the growing need for Vulnerable Road User initiatives (VRU), it is simple to include bikers, bicycles, and scooters in addition to other vehicles.
3. Pick the right LiDARs for your application
The user can navigate through a comprehensive list of compatible LiDARs and choose the appropriate model, or a combination of models, from a variety of manufacturers (360° FoV, Narrow Field of View, Dome).
In many cases, you will see that the right solution is to combine sensors from different manufacturers.
In other situations, you may find that different LiDAR solutions work about the same, so you can choose the one you prefer.
In a previous Outsight project, for example, we had to combine point clouds from two different LiDARs (Livox and Ouster) to make a solution that could detect specific objects on the ground.
The Simulator is compatible with most of the LiDAR manufacturers and models, including sensors from Hesai, Livox, Velodyne, Ouster, Robosense, Blickfeld, Innovusion and Innoviz.
4. Find the optimal LiDAR coverage
One can identify the optimal trade-off between performance, hardware cost, and complexity by testing various choices and coverage levels.
5. Focus on Zones of Interest
If you are familiar with the Augmented LiDAR Software family of solutions, you will feel at home while facing a similar user interface in the Simulator.
The best example is that you will be able to create Zones of Interest in the Simulator just as you can in the Software, making it possible to anticipate the coverage performance only in specific areas.
This can have many interesting use cases, such as predicting results for crosswalk surveillance or crowd monitoring in sensitive areas.

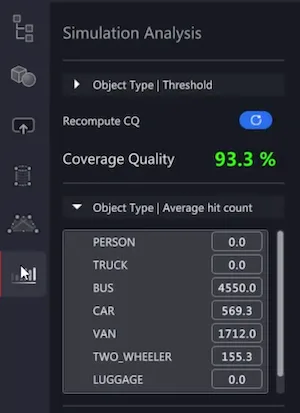
6. Check your detailed Simulation Analysis
The Simulator’s coverage quality computation yields exact findings in an indication that is simple to comprehend.
Customizations to your need
SEAMLESS IMPORT OF 3D MODELS
Using an elegant preview selection, many backdrop images and external 3D objects may be incorporated into a simulation.
3D SHAPES AND ZONES EDITOR
It has never been simpler to design, manipulate, and customize 3D zones and shapes in high definition.

Optimize your workload
MULTI-ITEM MANAGEMENT
As a result of user feedback, we have introduced productivity-enhancing features: the user can concurrently move, adjust, and modify the attributes of several objects, forms, and LiDARs, which helps to accelerate workflows when many LiDARs are involved.
MULTIPLE LIDARs OR LARGE PREMISES
Without the proper tools, selecting the optimal combination of LiDAR models and their positions is a difficult endeavor.
Outsight’s simulator and software solutions assist our customers in optimizing the solution’s cost and effectiveness.
Conclusion
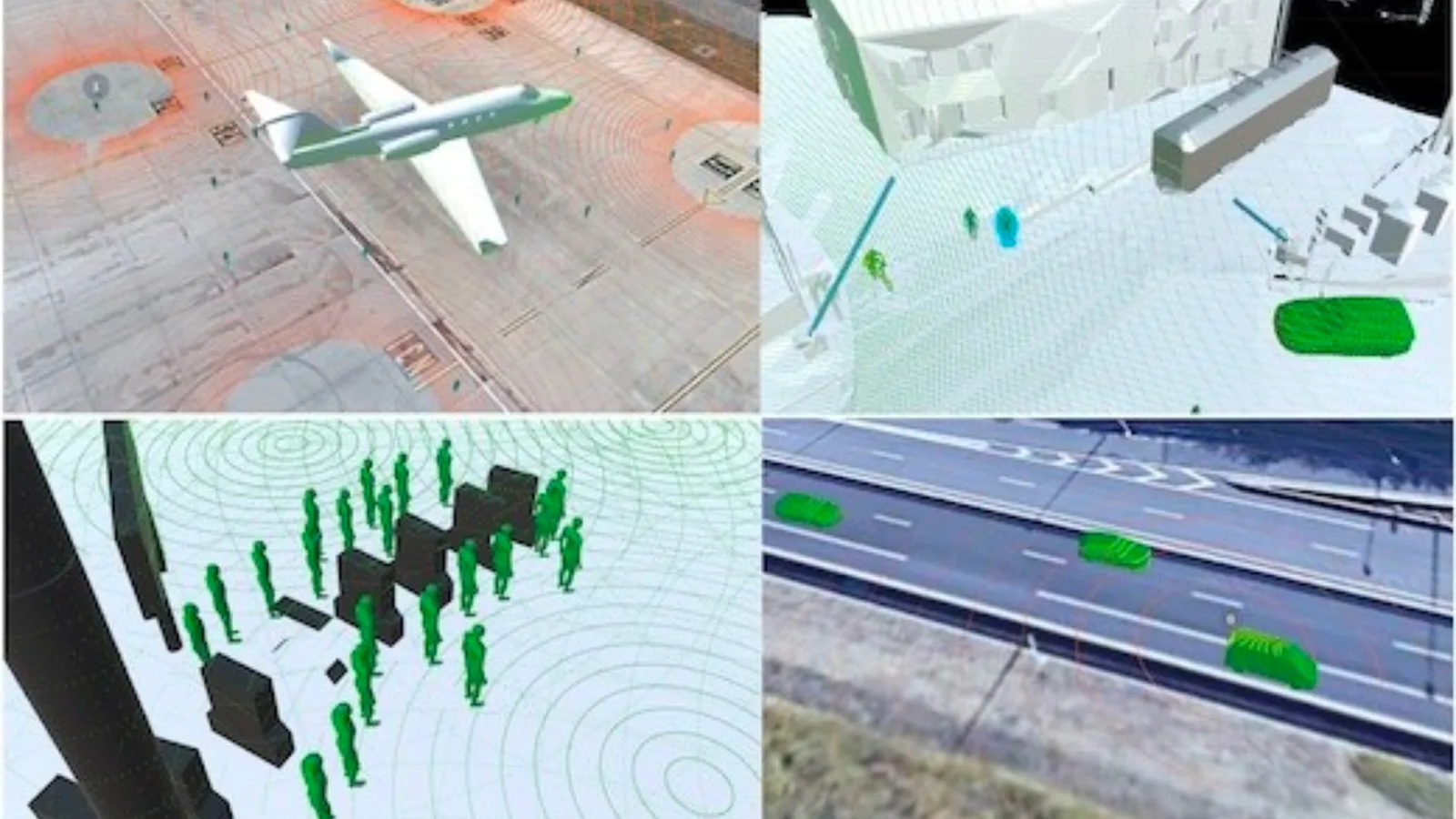
At Outsight, we created this simulator with the purpose of serving any use case and application, from airports to mobile robots, passing by smart cities, automotive, and industrial applications.
The simulator is free of charge for any of Outsight’s clients.
If you need support or want help starting a simulation, contact support@outsight.tech.

