


“Airports aren't buildings, they're living organisms of motion. Motional Digital Twins finally give operators the nervous system they need.”
DTC

















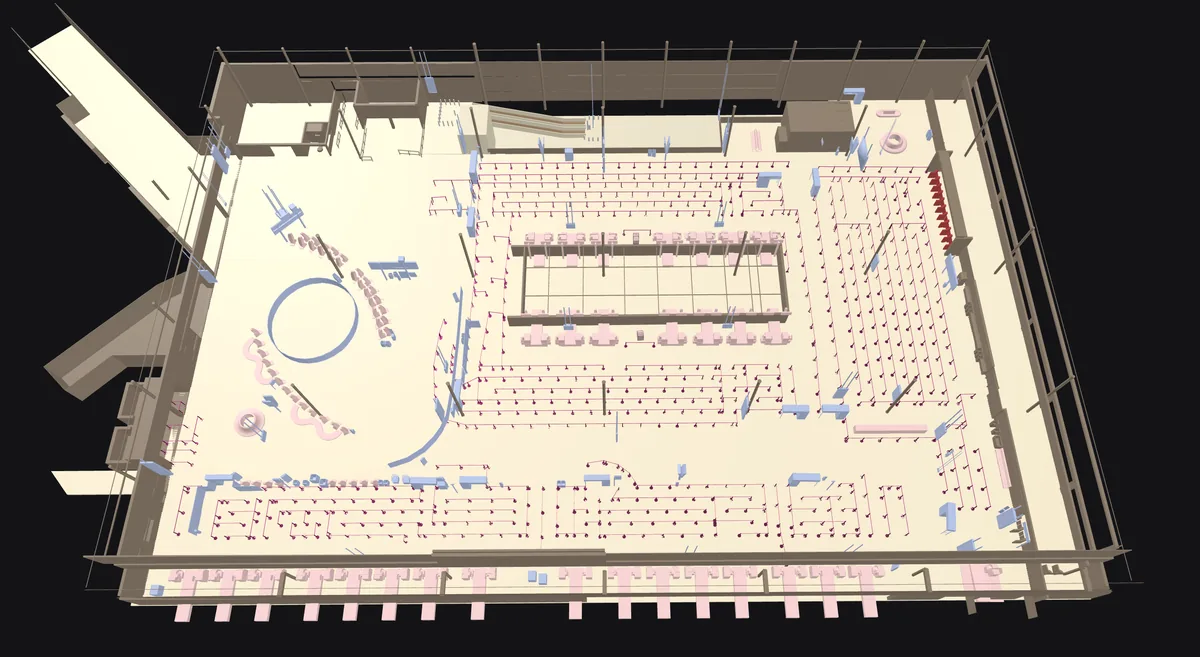
Understanding reality in motion
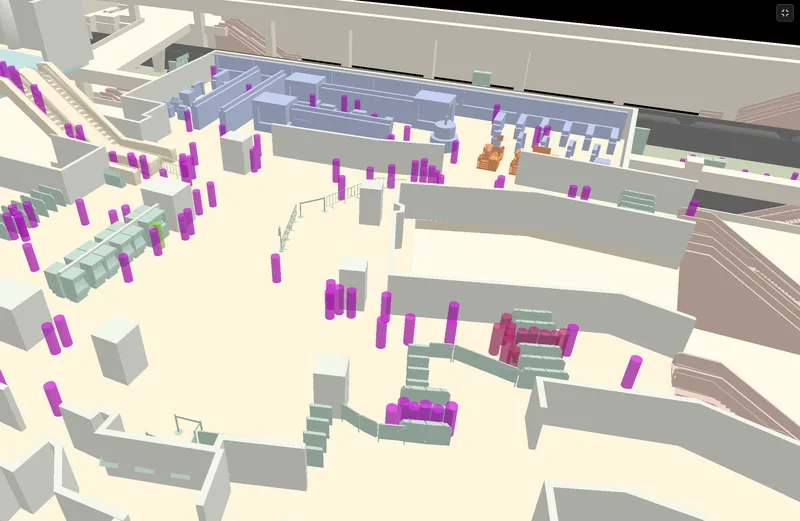
Position, speed, and trajectory are kept without interruption from entry to exit, even as entities cross between sensors. Behaviors and interactions are detected continuously, in real time.
Every person, vehicle, and robot is detected the moment it enters the scene and assigned an anonymous identifier. No images, no faces, no plates, just the geometry of motion.
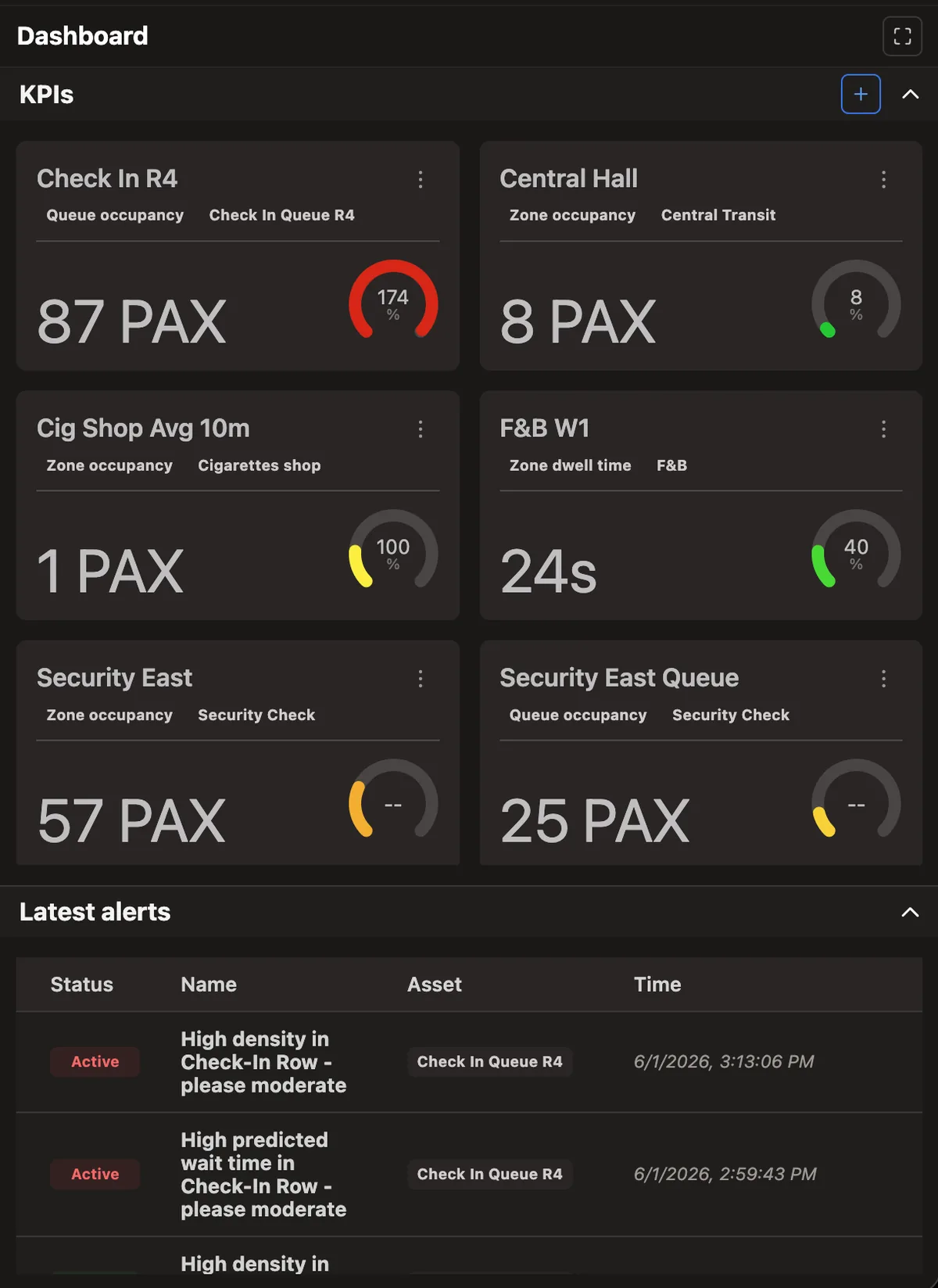
Live 3D playback, custom KPIs, alerts, dashboards, and APIs, one structured source of truth, surfaced inside the tools your teams already use.
“Airports aren't buildings, they're living organisms of motion. Motional Digital Twins finally give operators the nervous system they need.”
DTC
“We are able to know exactly how busy a station concourse is, as well as counting the number of people entering or leaving a store. This data will enable us to make the most of the commercial spaces in our stations.”
SNCF
“Our implementation and collaboration with Outsight shows how our integrated approach delivers not only practical value for airport operations, but real-time awareness to travelers.”
NEC
Real-Time 3D-based Multi-modal Data
Powered by 3D. Enriched with multi-modal data.
The 3D Data from Lidar can be enriched by data from other sensors and systems.
 Cameras
Cameras  Wireless
Wireless  Business Data
Business Data Capturing spatial data



Lidar from any manufacturer.
Making sense of it
 Perception
Perception  Classification
Classification  Interactions
Interactions Delivering Spatial Intelligence
Unlocking Premises-wide Physical Flows Insights
Every journey, understood across four key aspects and captured continuously for millions of people and objects, reveals how your site truly operates.
Where & When
Current location, historical and current trajectory, speed of movement, dwell times, queuing, and cumulated behaviours.
Who
Staff vs. visitor, adult or child, wheelchair, vehicle class, plus any external attribute linked to a person (e.g. POS data).
What
Interactions with physical resources, zones of interest, and touchpoints. Arrival or departure, joining a queue, completing a purchase.
How much & How often
Equipment use, seats, boarding gates, check-in counters, sanitaries, immigration desks, and any other asset.
How it works
The Outsight Platform covers the full lifecycle of a project, from initial design through day-to-day operations and long-term maintenance. It plugs into the systems you already run and is open to technology and integration partners who extend its capabilities further.
3D Simulation
Every project starts by understanding what you need to achieve and the physical constraints of the site to equip.
Our multi-vendor simulator evaluates layouts and sensor mixes against those goals and proposes the hardware configuration that delivers the right performance at the right cost, indoors and outdoors.
Digital Twin Creation
Digitizing movement in the physical world requires a 3D map of your site.
If you already have a BIM model or a Digital Twin, we use it directly and add the movement layer on top. If not, we build it with you as part of the project.
Situational Awareness for every object
Anonymous IDs are assigned at the moment of entry and maintained with centimeter precision, uninterrupted, until exit. Every action becomes a recorded event. We don't only capture position, shape and behaviour are tracked too.
This allows each object to be classified into categories such as cars, buses, two-wheelers, or pedestrians, with finer distinctions like adults, children, wheelchair users, or staff.
Making sense of 3D data
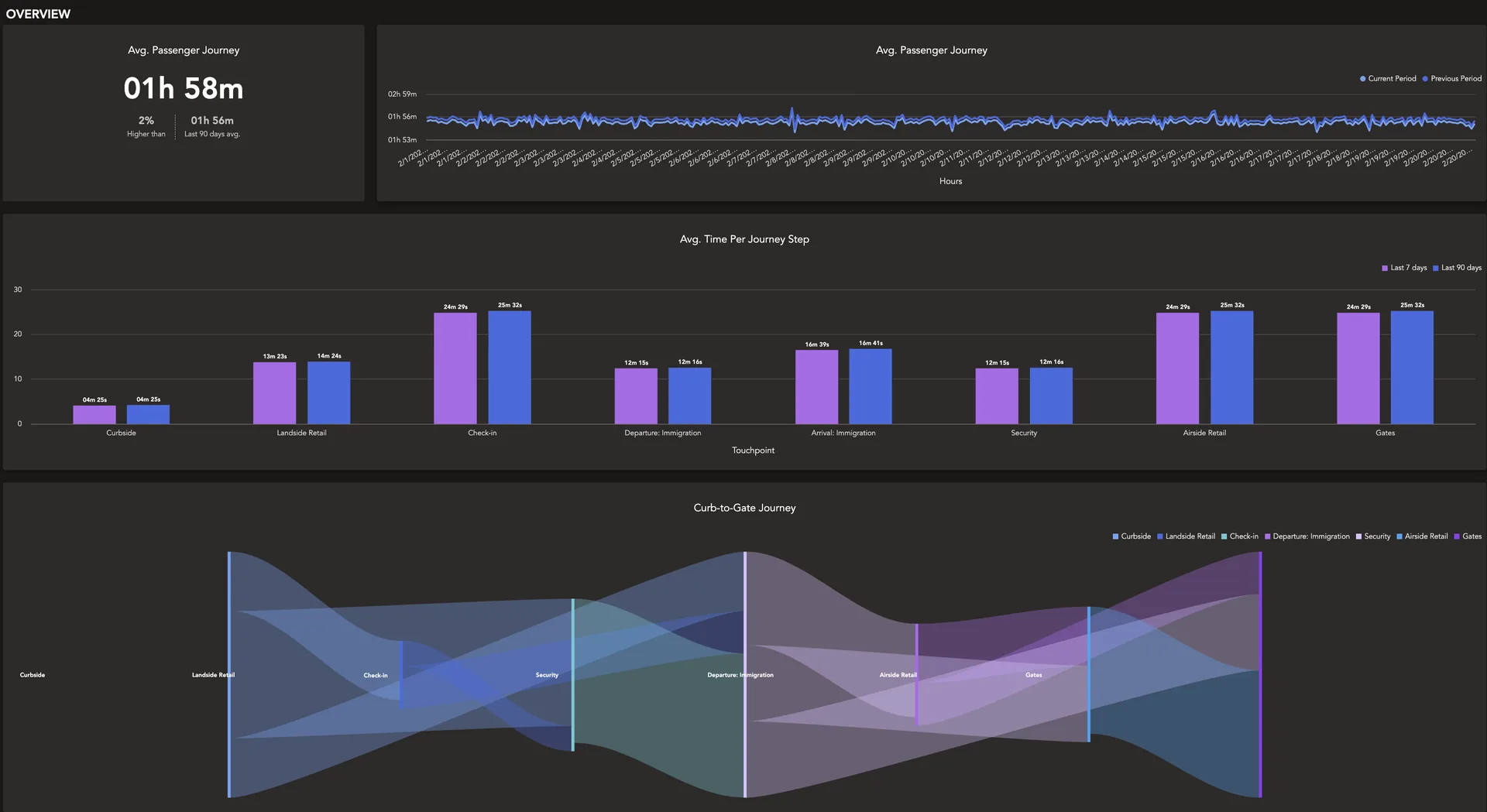
Real-time tracking generates an unprecedented wealth of spatial data, which the Platform turns into actionable signal: flows, bottlenecks, dwell times, asset usage, and predictions.
You define your zones of interest and the KPIs you want to measure (counting, density, queue length, wait time, throughput, resource utilisation), and the analytics engine computes them continuously.
Expanding capabilities
The Platform is built to plug into what you already run. It can ingest signals from complementary sensors (cameras, Wi-Fi) and from business systems such as databases, flight schedules or point-of-sale, to enrich the spatial picture wherever it adds value.
In the other direction, every metric and event is exposed through a documented API, so technology and integration partners can extend the platform with their own capabilities.

Always-on, always monitored
It's not all about features. Our customers run some of the most critical infrastructures in the world, where downtime isn't an option. They need the right tools, processes and infrastructure to continuously monitor what's deployed and to keep operations running, backed by the support to match.
Dive Deeper
Beyond Line-of-Sight Physical AI for Robots represents the next leap in mobile robotics intelligence, moving beyond the constraints of onboard perception to give every robot a shared, premises-wide view of people, vehicles, and assets in real time, through infrastructure-mounted LiDAR and Physical AI.
From movement to intelligence
What happened
Replay any past moment in 3D. Mine months of operations for patterns, anomalies, and root causes.
What's happening
Occupancy, dwell, throughput, queues, surfaced the instant they cross your thresholds.
What will happen
Forecast demand, bottlenecks, and congestion before they happen.
Beyond flat data
To understand the real world, Physical AI needs sensors that perceive it accurately: in three dimensions, in real time, and without compromising privacy. LiDAR is built for this.
The only technology that captures position, shape, and behavior in true 3D, with centimeter precision and no personal data captured.
Understanding 3D Perception
Works indoors and outdoors, day and night, in any weather. Automotive-grade reliability, with no blind spots across complex sites.
How does Lidar work? (in detail)
Scale economics, fewer sensors per site (vs. cameras), and dozens of competing manufacturers have brought LiDAR into mainstream budgets.
The cheap Lidar is here to stay
Enables merging sensors. Every point is tied to a real 3D location, any other data source, from cameras to business systems, can be attached to it.
How different sensors see the world
A unique additional value
Laser light, unlike cameras, doesn't recognize people. You can now anonymously monitor individuals and vehicles without gathering any image, license plates, FaceID or other personal data.
Wherever things move






Insights

Outsight’s Shift platform integrated into Google Distributed Cloud Edge powered by Intel Xeon 6 SoC – Live demonstration at Google Cloud Next 2026

In its latest Emerging Tech Impact Radar: Computer Vision report, Gartner identifies Outsight as a key vendor in Spatial Computing, alongside major technology players such as Nvidia, Meta, Alphabet, and Matterport.

We are excited to share that Outsight has attained SOC 2 compliance, proving our commitment to safeguarding the security and privacy of customer data.
Unlike cameras, which perceive reality from a single point of view, 3D native data from LiDAR opens up new possibilities.







