
From smart cities to autonomous machines, companies in both the public and private sectors are increasingly looking to leverage the benefits of 3D perception. Five mega-trends are propelling the technology.
Application developers are turning to 3D LiDAR either to replace legacy sensing technology or to create solutions that were once unachievable.
Unlike existing 2D-based perception technologies, LiDAR produces highly detailed, accurate spatial measurements and works in a range of environments and contexts such as during the night and under direct sunlight.
Take a look at this article to understand the basics of the technology:
Understanding the basics of 3D LiDAR Technology
Light Detection and Ranging, also known as LiDAR, is a technology for remote sensing that is used to measure distances in an environment.
Read article →
LiDAR also offers an important nontechnical advantage when deployed at scale: no personally identifiable information is ever captured.
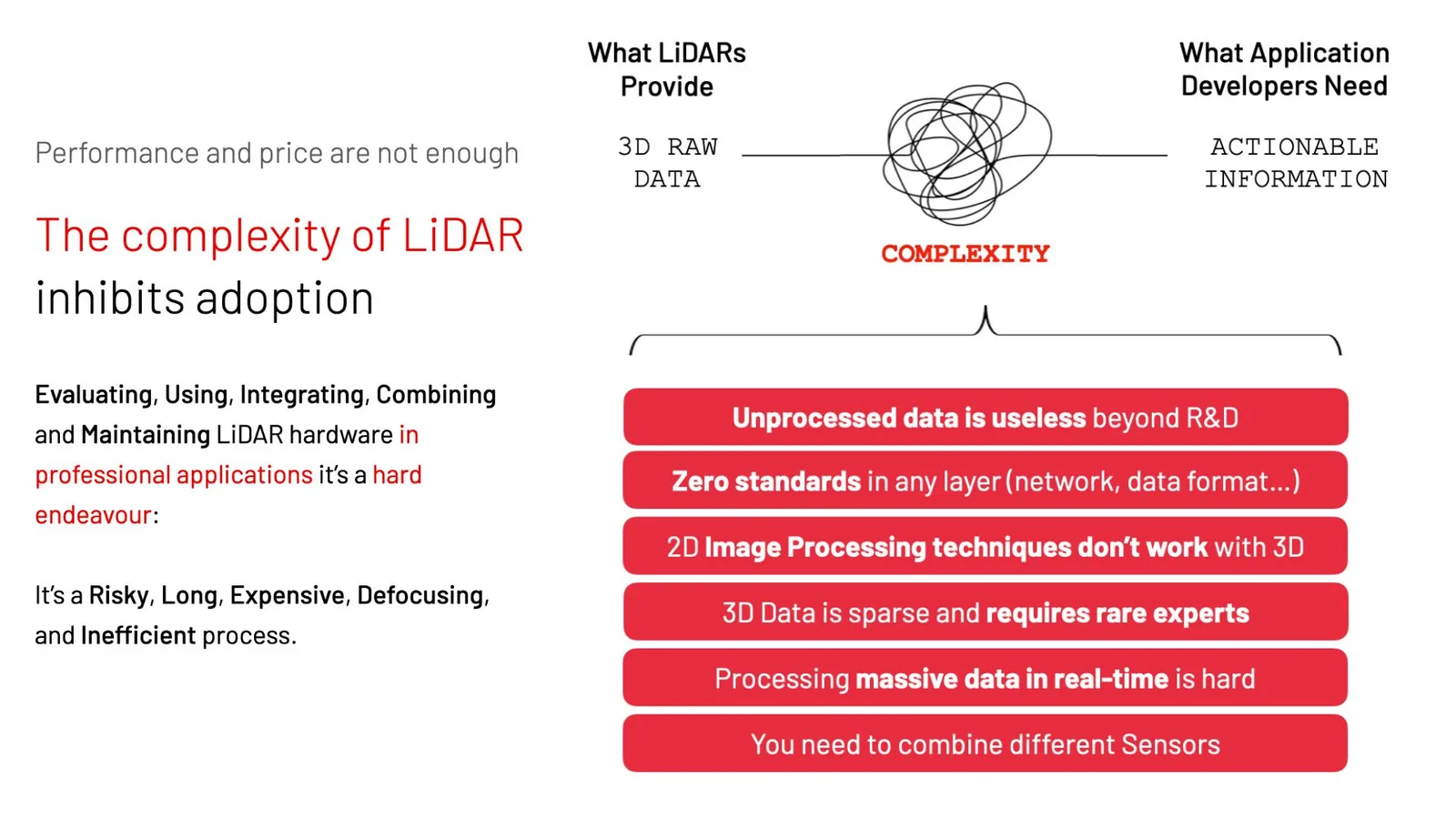
Companies are always looking for ways to improve their operations and differentiate themselves, so what’s holding LiDAR back?
Contrary to what the majority of observers who are primarily focused on the automotive industry think, it’s not cost or performance that’s inhibiting a broader adoption of LIDAR.
Instead, it’s the complexity associated with this new technology.
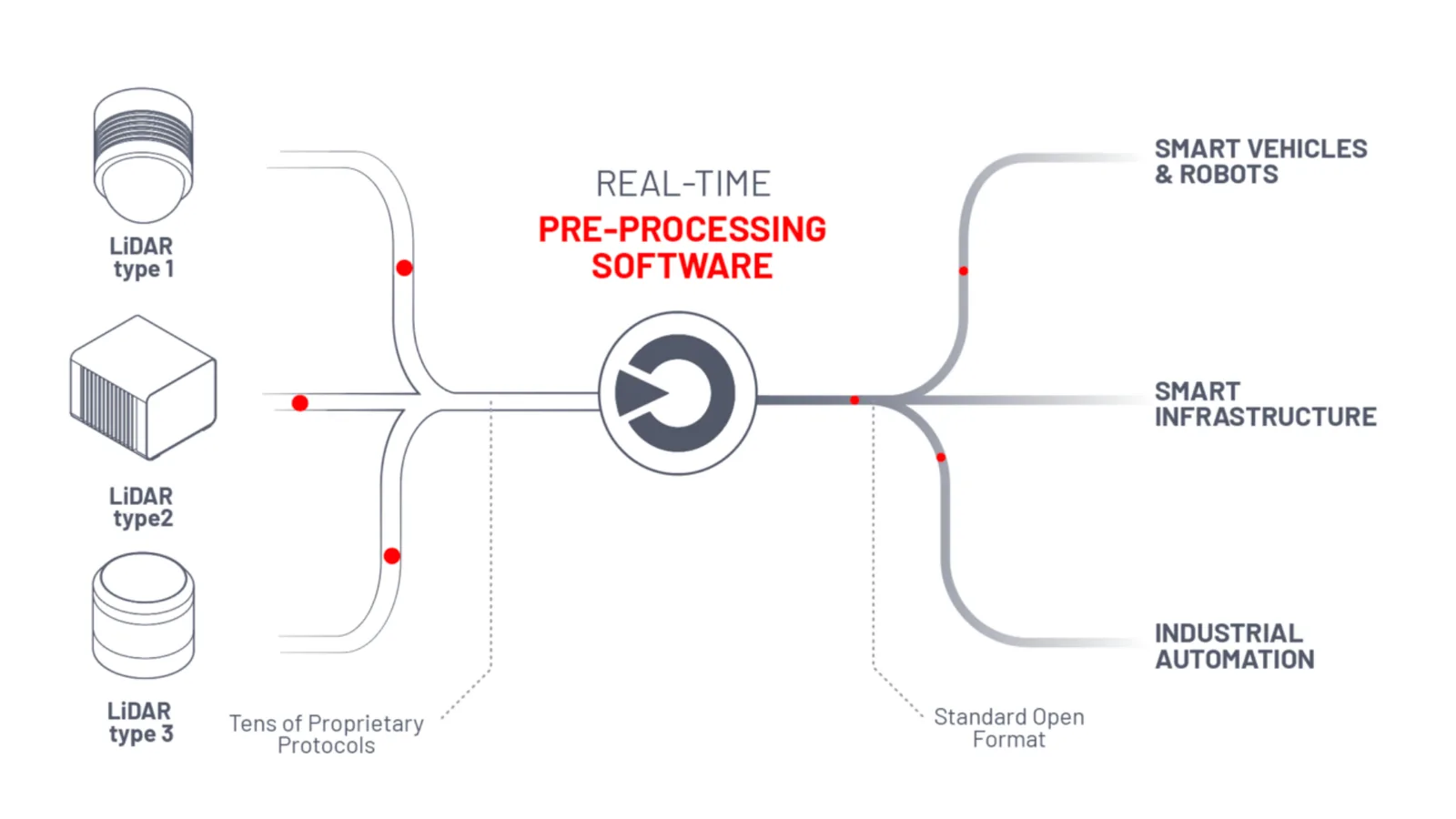
A 3D LiDAR Pre Processor turns RAW sensor data into actionable information
Running in real-time, LiDAR pre-processing software takes raw 3D data as an input and instantly converts it to accessible, actionable insight.
As its names indicates, a pre-processor doesn’t replace the application-specific software but facilitates and accelerates the development of LiDAR projects.
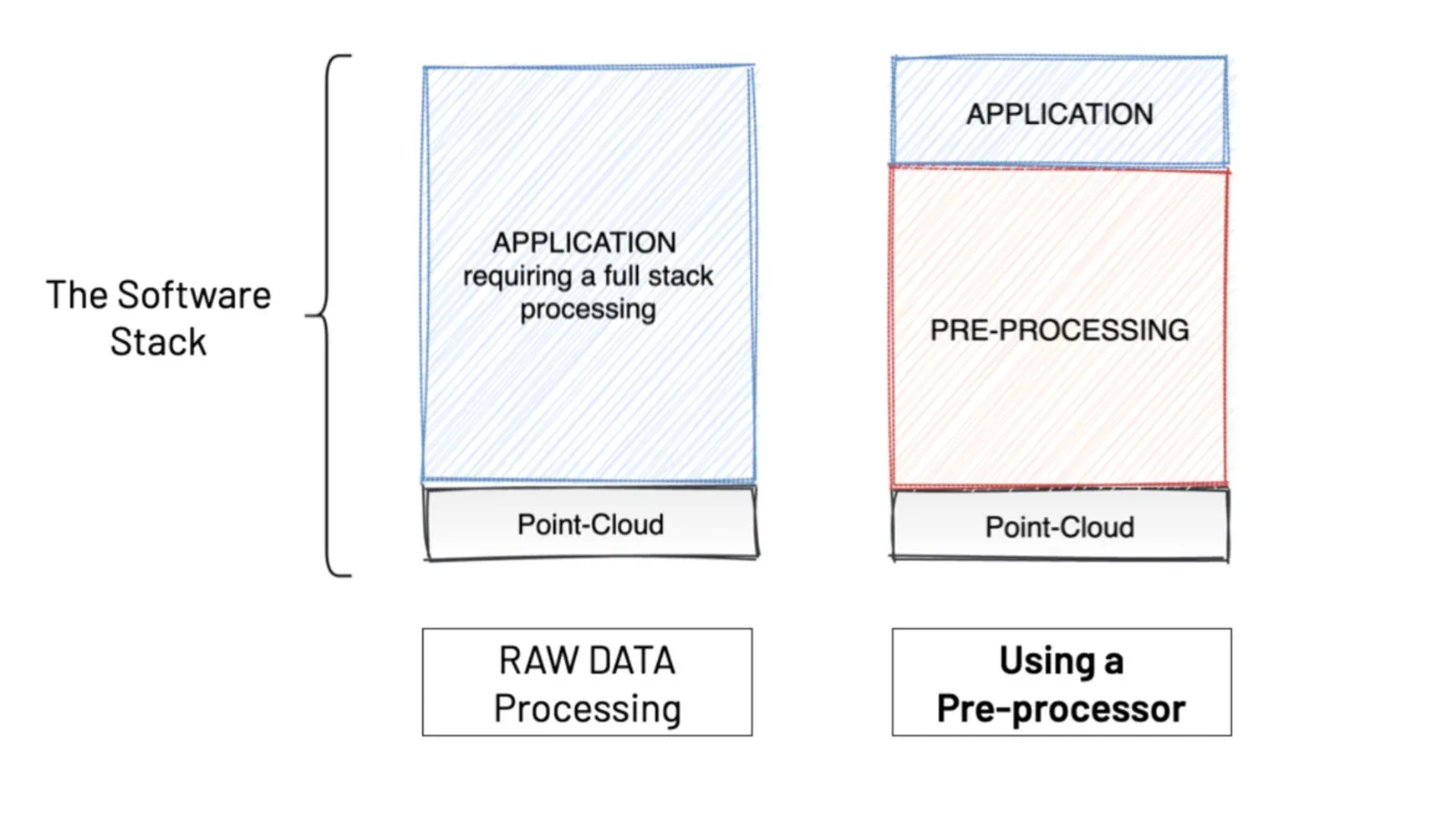
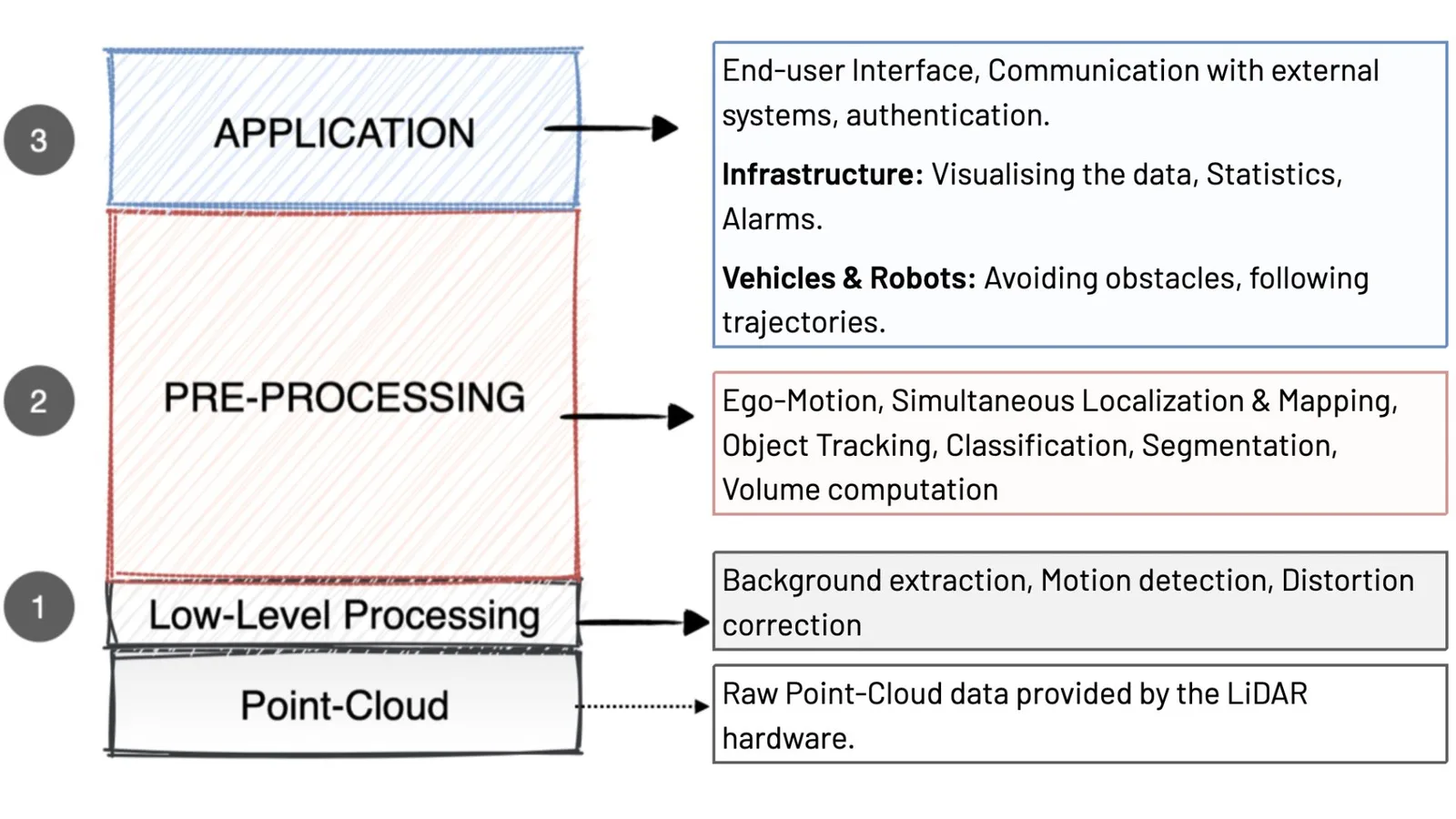
In general the software stack can be organized in 3 abstraction layers running on top of the basic point-cloud that the LiDAR hardware provides:
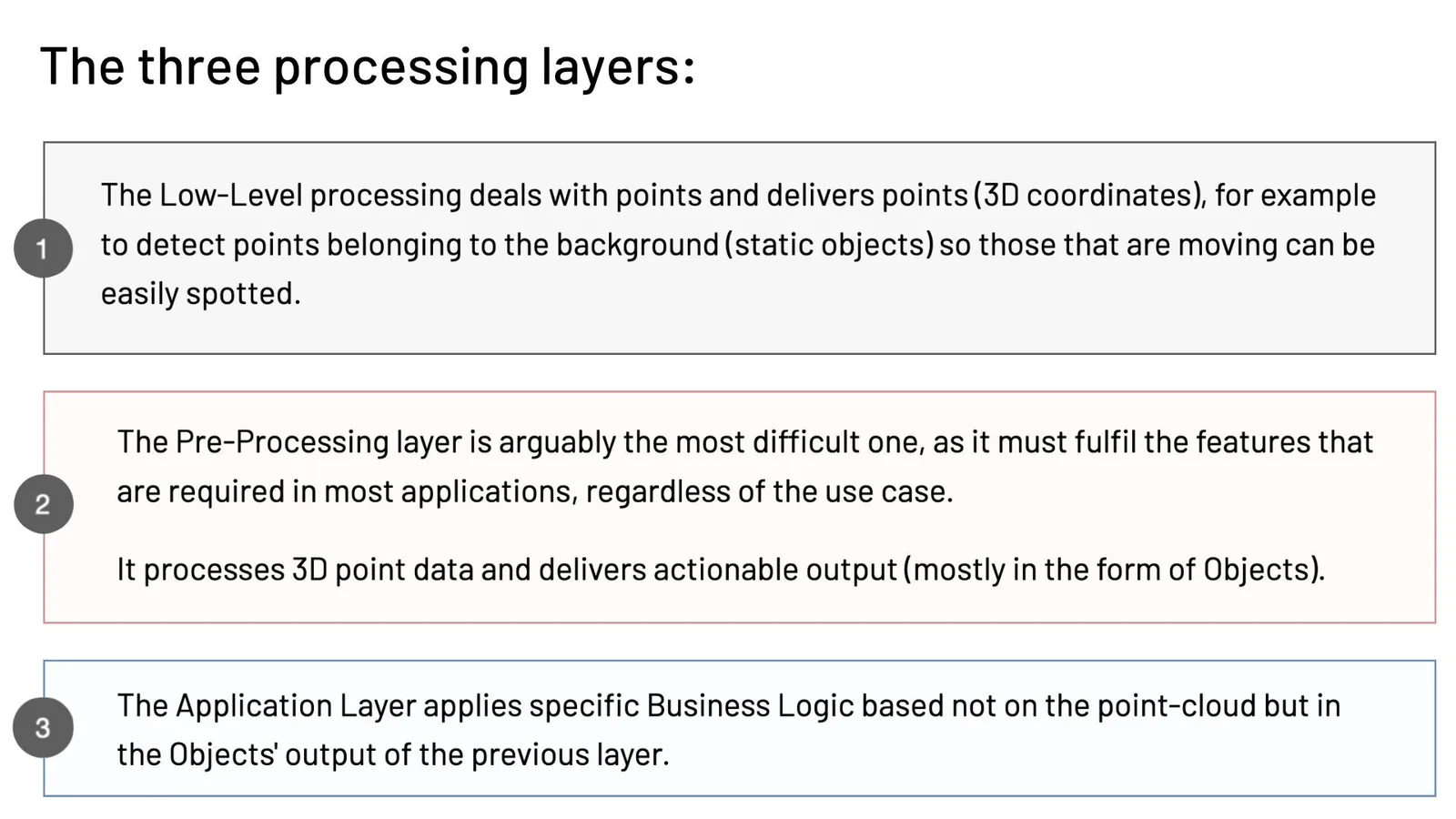
The overall objective of a LiDAR pre-processor is to make it super-easy to use and integrate this awesome technology.
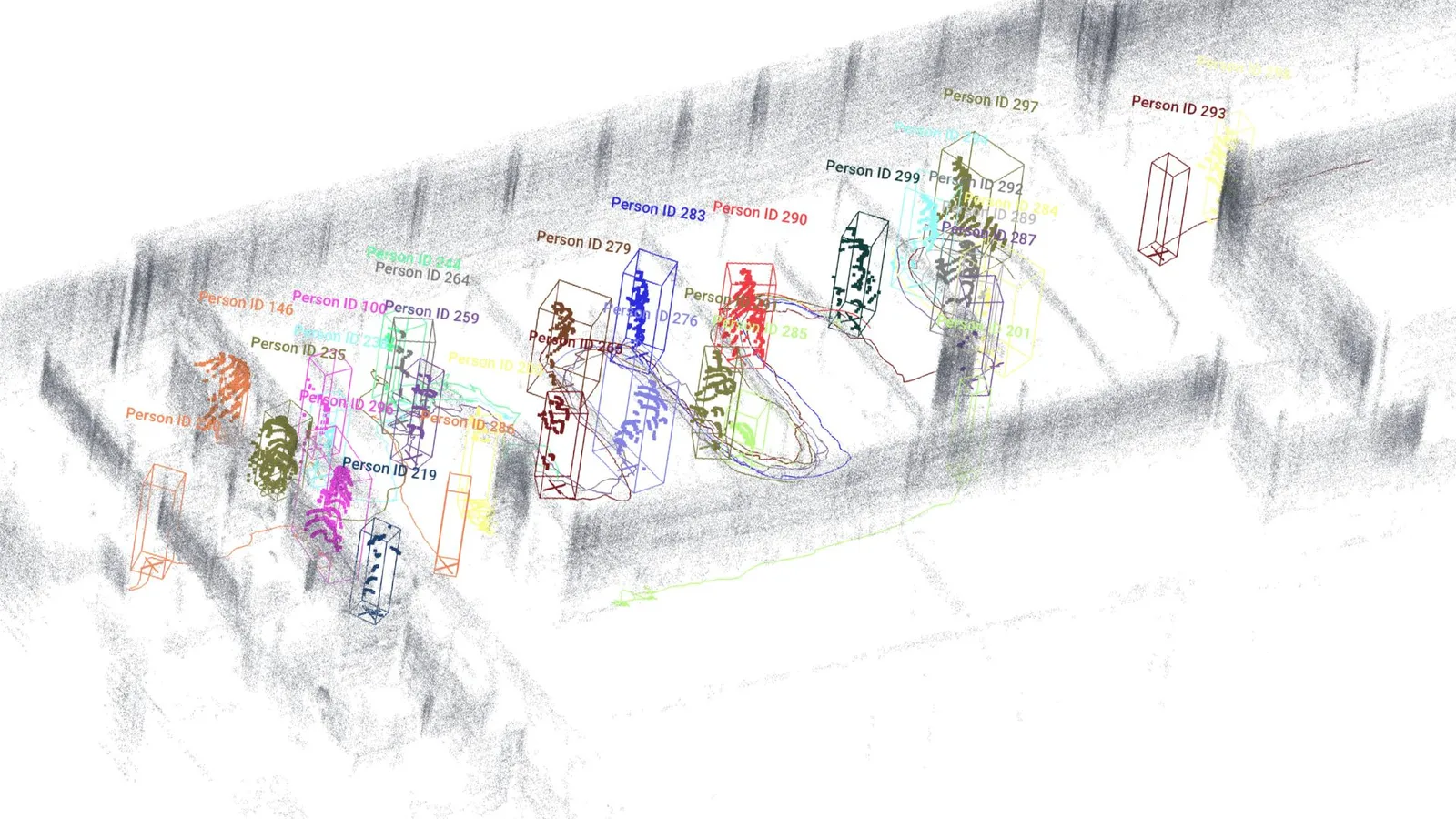
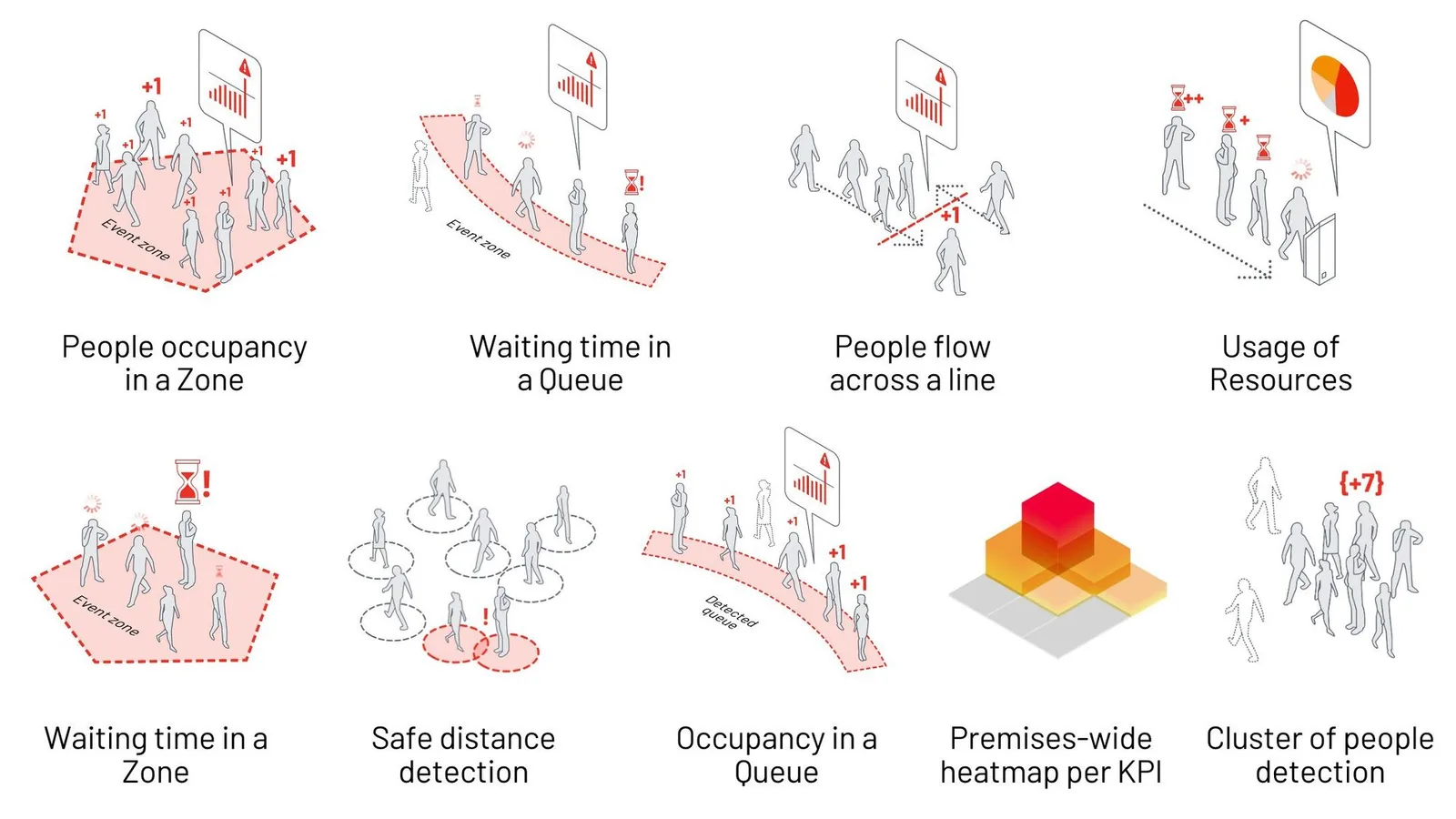
For example, in a People Flow Monitoring applications the Pre-Processing Layer will detect the persons and objects among all the other points returned by the LiDAR, and output their unique ID, Position, Size, Speed and Classification.
These are the informations required for the Analytics layer to generate meaningful KPI’s:
Take a look at this other application in the context of Smart Cities, where the objective is to disminish accidents between vehicles and VRU (Vulnerable Road Users) in city intersections:
Outsight’s Comprehensive ITS Solution
Outsight provides the easiest and most comprehensive way to use LiDAR in ITS: from Simulation to Deployment and Analytics’ Dashboard.
Read article →

In a different context, starting using SLAM (Simultaneous Localization & Mapping) for mobile robotics & Smart Vehicles applications is now possible in a matter of seconds, without needing to install any framework or software in your computer:
In more detail, the four main functions that a Pre Processor performs simultaneously are:
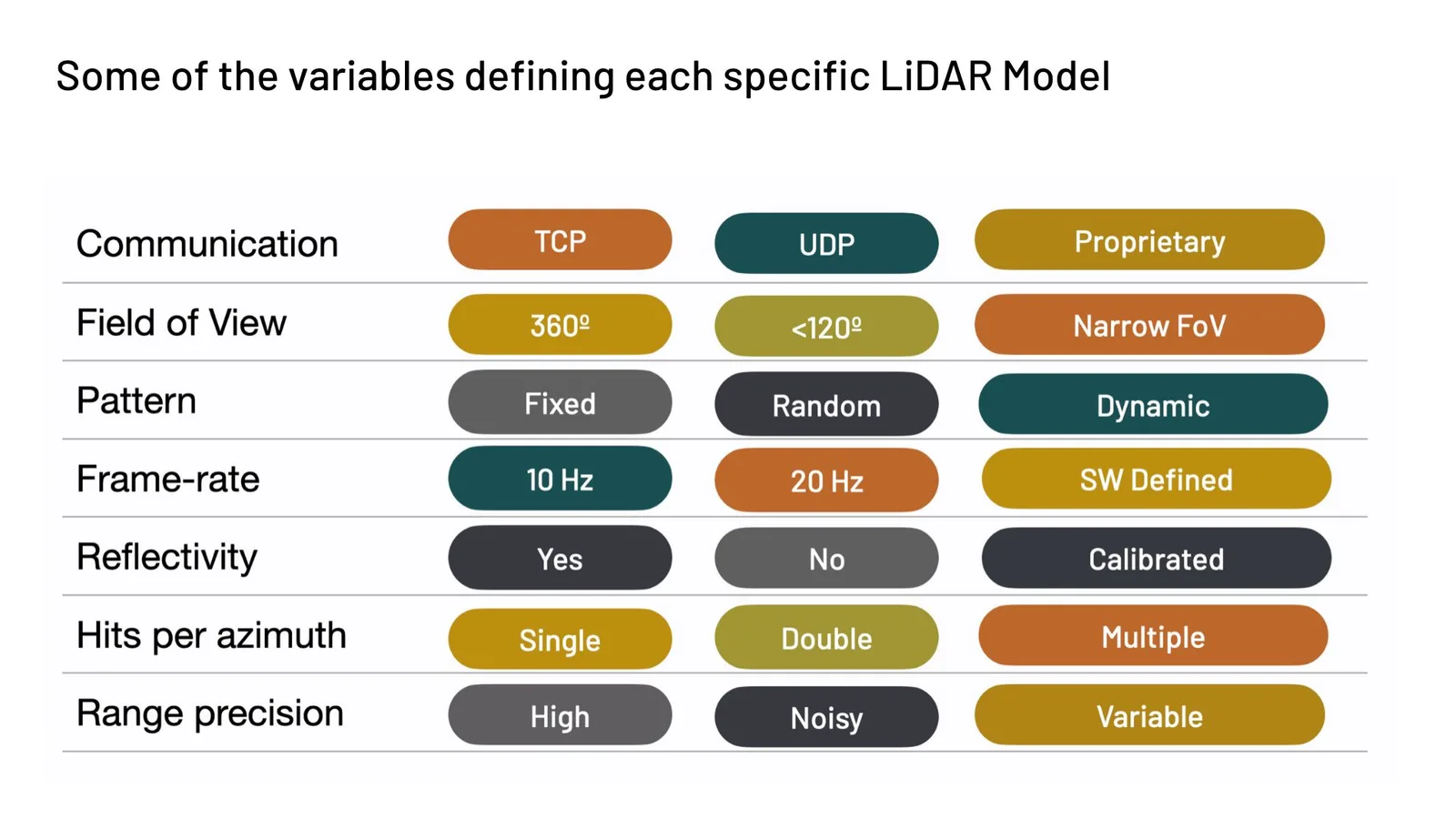
1. Abstracting the Hardware complexity (input): this means that the application developer won’t have to worry about creating a unique driver for each Sensor, as well as adding features that allow data from different manufacturers to be fused (combined).
It’s easier said than done since there is no standard among manufacturers, in the network, transport nor application layer, and there are many different combinations to choose from :
Outsight provides a LiDAR-agnostic software solution embedded in a plug and play Edge device.
A good Pre-Processor needs to be compatible with more than 90% of Lidar hardware manufacturers:
OUTSIGHT has built strategic partnerships with most of the LiDAR manufacturers
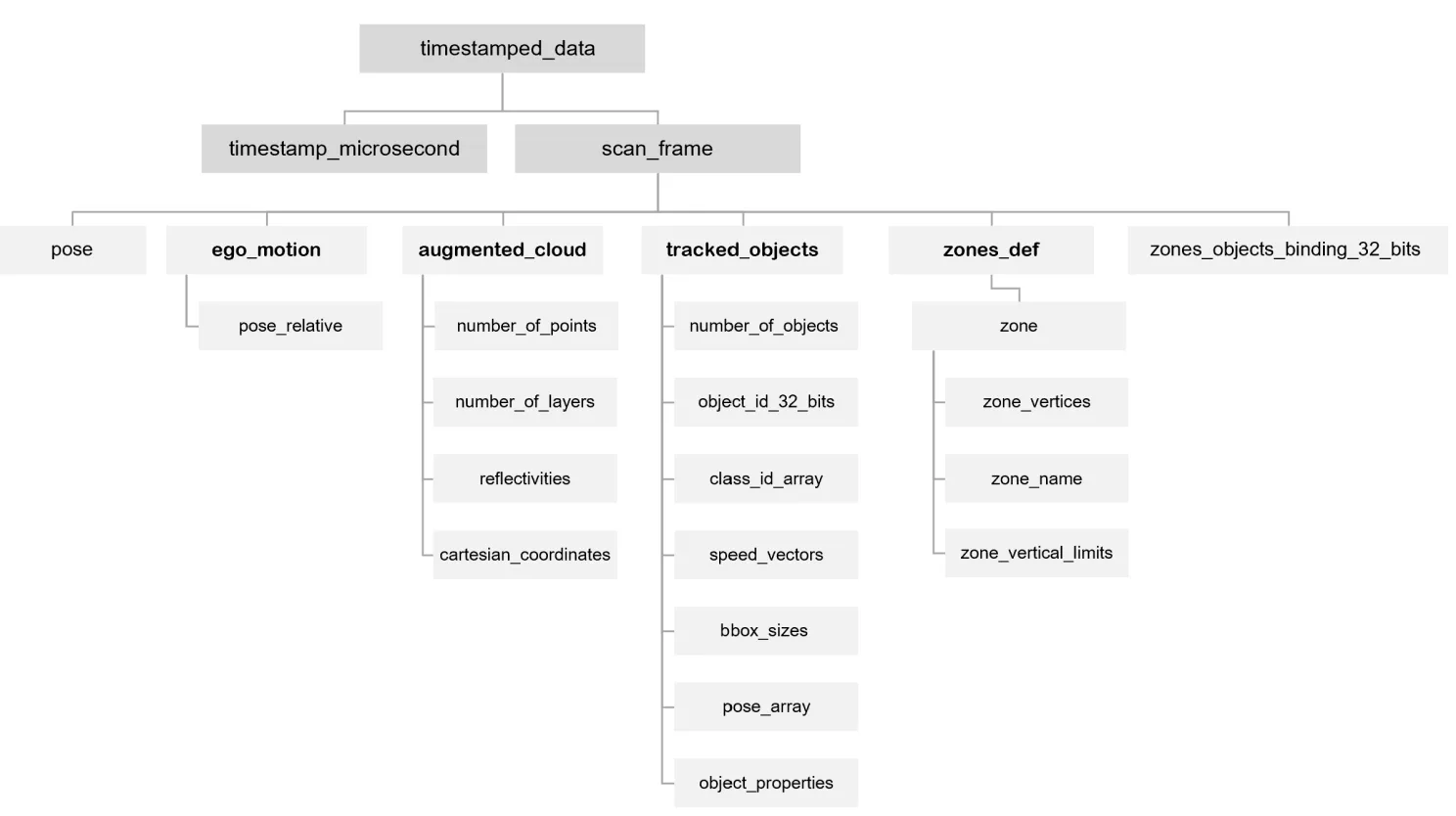
2. Standardising and simplifying the output: LiDAR proprietary data formats and protocols made sense when this emerging technology first appeared since it shortened the time to market of new hardware products delivering raw data. The burden of decoding each specific format was on the user.
For a LiDAR pre-processor to accomplish its purpose, it must provide an open data representation system.
The Outsight’s Augmented LiDAR Box© delivers its output using OSEF, a serialisation binary format, based on TLV-encoding.
You can learn more in this article about the 7 Attributes required for an Open Data format:
Key Features of Open Data for LiDAR
When choosing a 3D LiDAR processing software it’s important to ensure that it uses an open and standard data format, that must meet seven key characteristics.
Read article →

3. Reducing the required bandwidth and processing requirements of the Application layers: ingesting at the application level the whole 3D RAW LiDAR point-cloud is… pointless. The pre processor must provide only relevant data for the application at hand, dramatically decreasing its volume.
4. Make the data processing heavy lifting, that is, perform the key features that are commonly required in most applications: Object tracking and classification, Segmentation, SLAM (Simultaneous Localisation and Mapping), Volume measurement…
Conclusion
As an application developer, you can stay up to date on LIDAR hardware technology and get the most value out of it with a real-time 3D pre-processor, allowing you to focus on the application’s added value, whether it’s a Dashboard for People Flow Monitoring, an ITS application in Highways or Intersections or a new Mobile Robot.
A glance at Outsight’s real-time preprocessing software
In order to become usable by everyone, LiDAR technology must evolve from its current status of a promising hardware component used by expert early adopters to a solution enabler that can be used by mainstream professional users.
That requires evolving from a hardware- centric approach, delivering raw data and surrounded by complexity, to software-enabled actionable insight.
A new category of products does exactly that: real-time 3D pre-processing software is here to stay and to empower a new generation of application developers to leverage the unique value of LiDAR data.
Want to know more?
Contact a Product Specialist or at our latest white paper:

